News
Explore the latest news of our lab!
2026
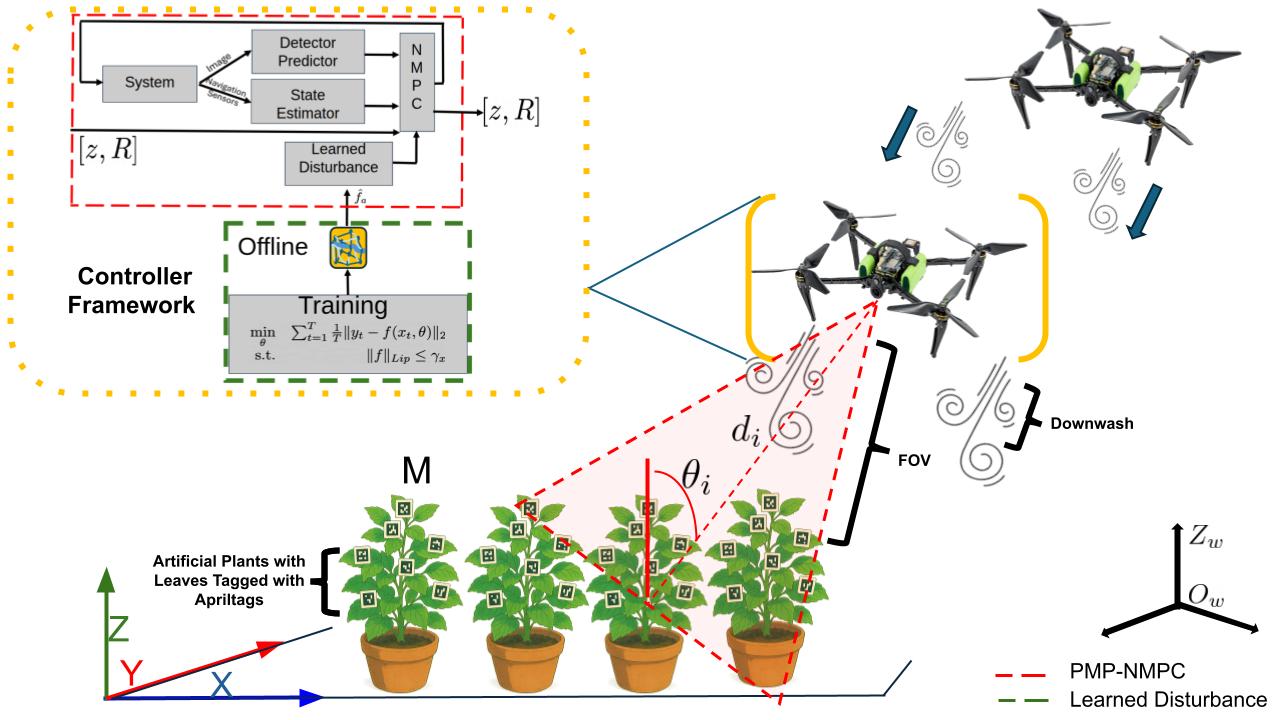
Our paper, “Neural PMP-NMPC for Adaptive and Stable Quadrotor Control in Perception-Driven Tasks,” has been accepted to the 2026 International Conference on Unmanned Aircraft Systems (ICUAS 2026).
We are excited to announce that the SCUBA Lab has been awarded funding through the third SMART Health seed funding initiative — a collaborative effort among the Colleges of Engineering and Computer Science, Medicine, Nursing, Science, and Social Work, along with the Division of Research at Florida Atlantic University. Our proposal was selected from 17 high-quality submissions, with 9 funded in total, and was recognized for its novelty, multidisciplinary team, team capability, and potential for future external funding.
SCUBA Lab recently delivered a successful presentation to FPL on our ground robot system for object detection and tracking.
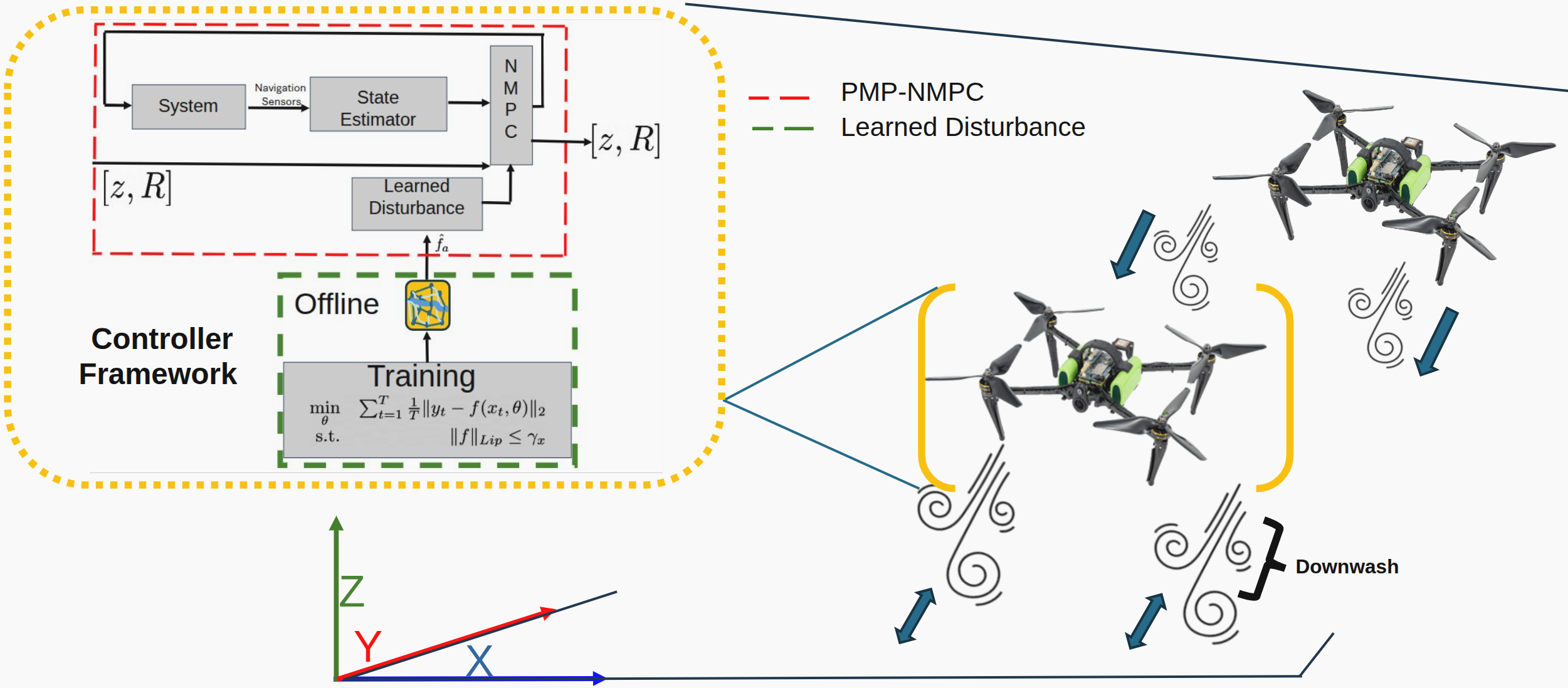
Our paper, “Pontryagin-Augmented NMPC for Stable Quadrotor Landing Under Learned Downwash Disturbances,” has been accepted to the 2026 European Control Conference (ECC 2026).
2025

We’ve got some exciting news from the lab today!
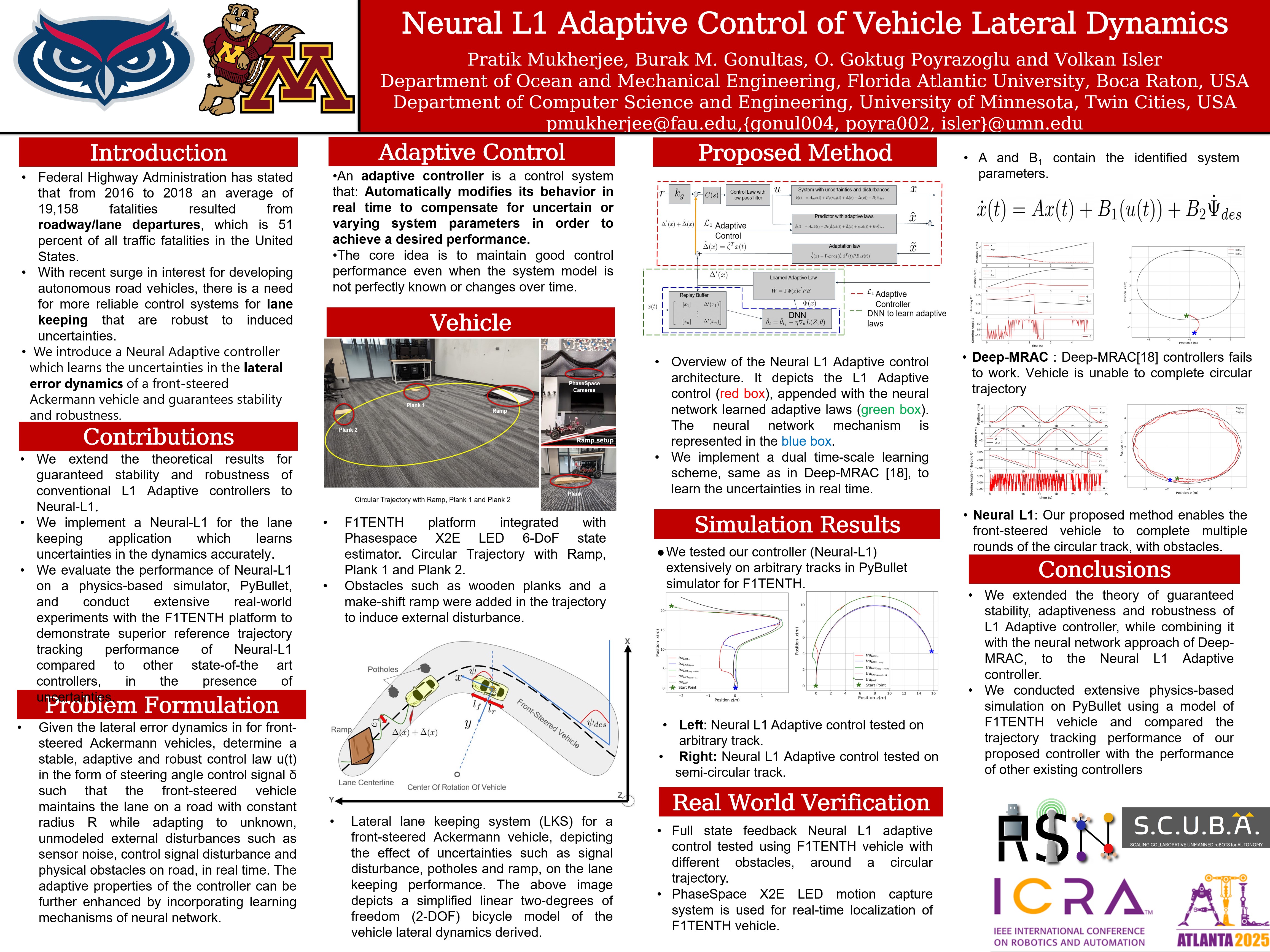
We presented our novel work on Neural L1 Adaptive Control at ICRA 2025.
Taiwo Hazeez, Cosme Penney and Daniel Guido’s paper titled “Evaluating Relative Localization in GPS-Denied Environments Using Starling2 UAVs” won the best paper award!
Taiwo Hazeez, Cosme Penney and Daniel Guido had their paper titled “Evaluating Relative Localization in GPS-Denied Environments Using Starling2 UAVs” accepted!