SCUBA Lab paper accepted to ECC 2026
SCUBA Lab Team
April 05, 2026
May 31, 2026
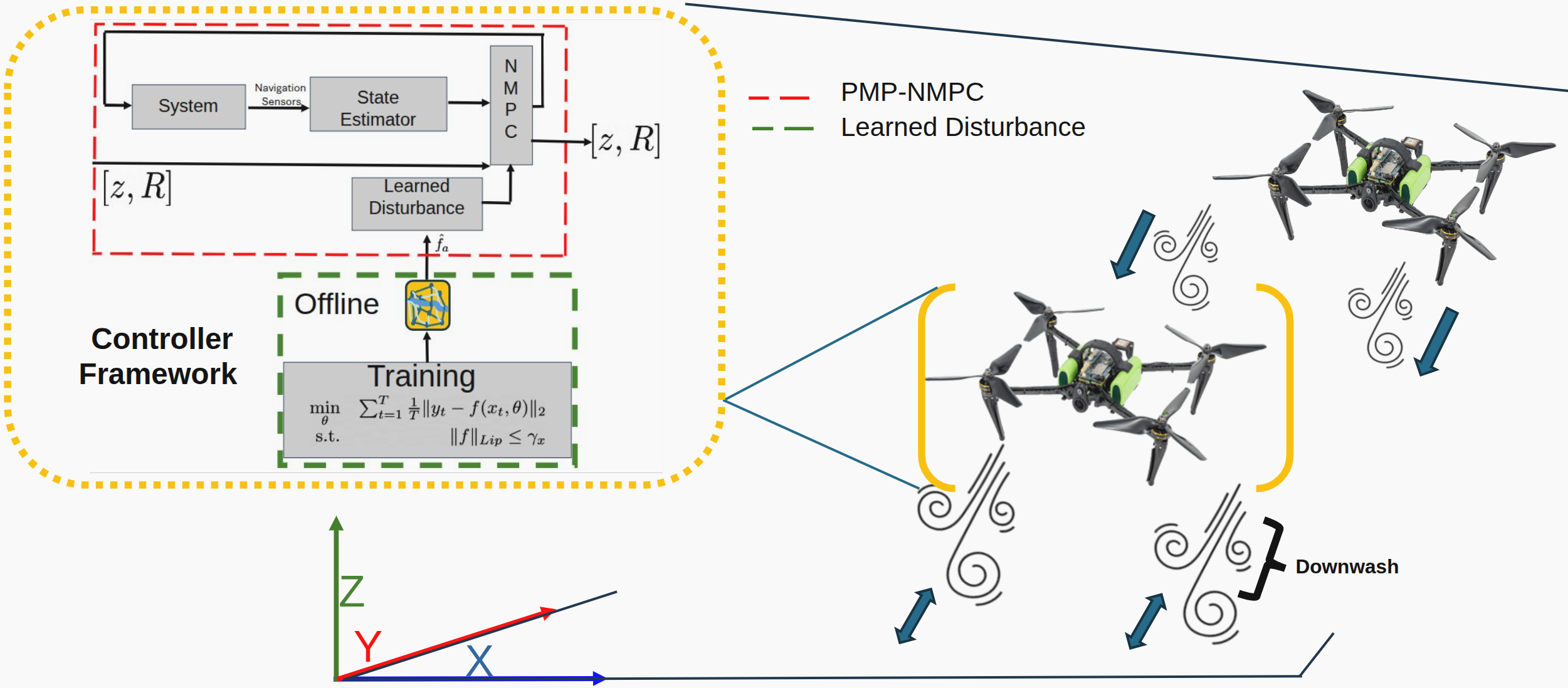
Our paper, “Pontryagin-Augmented NMPC for Stable Quadrotor Landing Under Learned Downwash Disturbances,” has been accepted to the 2026 European Control Conference (ECC 2026).
The paper presents a control framework for quadrotor landing that combines Pontryagin-augmented nonlinear model predictive control with learned downwash disturbance compensation to improve stability and robustness during close-proximity flight.
We look forward to presenting the paper in Iceland in July 2026.