SCUBA Lab Awarded SMART Health Seed Grant
We are excited to announce that the SCUBA Lab has been awarded funding through the third SMART Health seed funding initiative — a collaborative effort among the Colleges of Engineering and Computer Science, Medicine, Nursing, Science, and Social Work, along with the Division of Research at Florida Atlantic University. Our proposal was selected from 17 high-quality submissions, with 9 funded in total, and was recognized for its novelty, multidisciplinary team, team capability, and potential for future external funding.
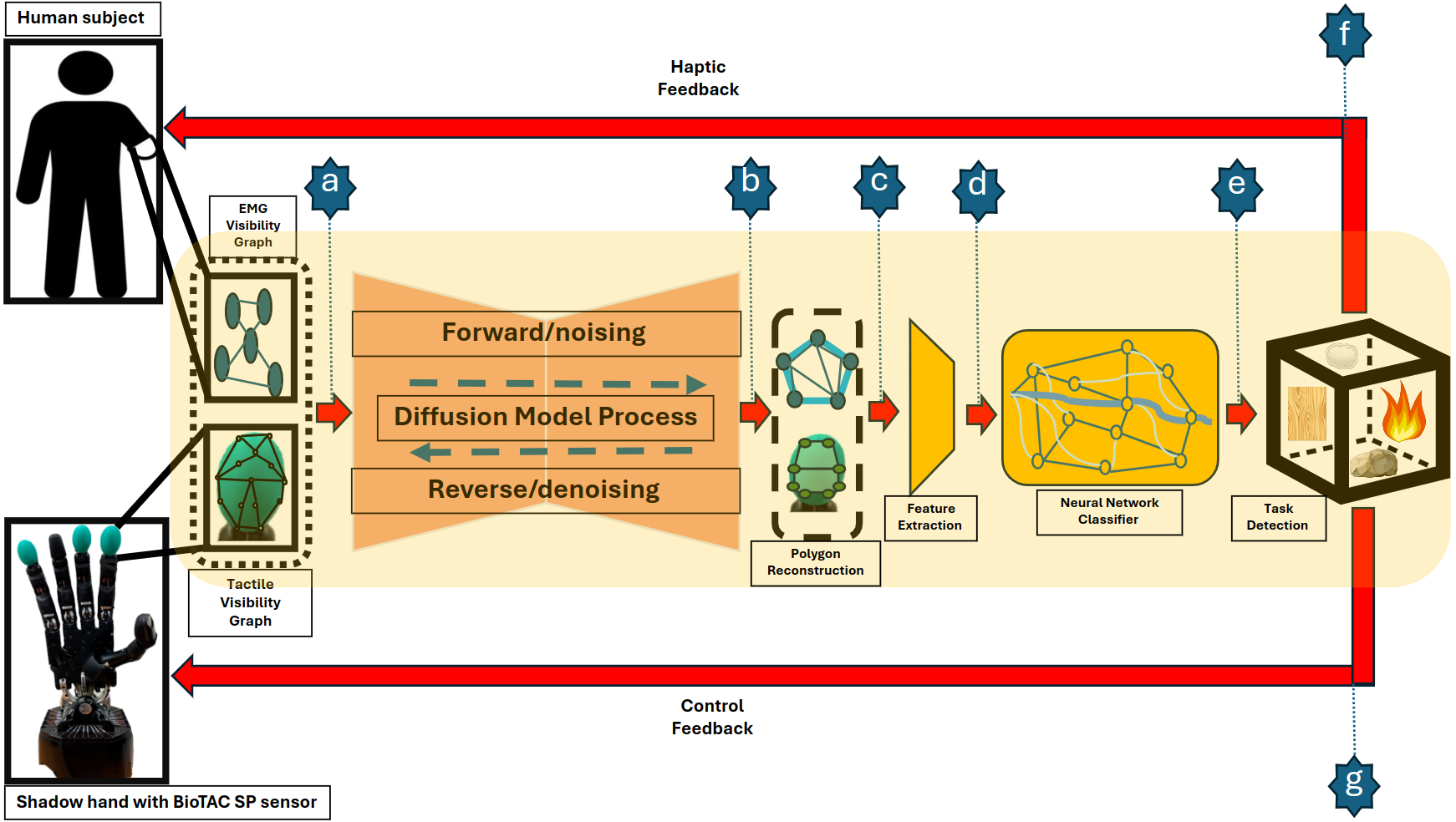
The project, funded at $25,399, aims to advance wearable assistive robotics through an AI-enhanced human-robot collaboration framework. Wearable assistive devices such as exoskeletons and prosthetic hands remain far less capable than the human hand, largely due to limitations in interpreting user intention and integrating tactile feedback. Our approach unifies the human and wearable robot into a shared sensory-motor system using dual sensing modalities: surface electromyography (EMG) signals from the user for intention decoding, and BioTac pressure maps on the robot for tactile perception. These signals are fused through a generative diffusion model that reconstructs latent representations of both tactile contact and motor intent, enabling the system to jointly reason about how the user wishes to move and what the robot feels during contact.
By coupling these spatially distinct sensing streams, the framework restores the natural feedback loop between sensation and action — without requiring explicit spatial calibration. The resulting human-AI collaborative controller enables adaptive, context-aware assistance that enhances productivity, dexterity, and autonomy, advancing seamless human-AI collaboration for next-generation assistive, industrial, and cooperative robotic systems.
We look forward to sharing our results at a public presentation in May 2027. Congratulations to the entire team!