SCUBA Lab Paper Accepted to ICUAS 2026
SCUBA Lab Team
May 30, 2026
May 31, 2026
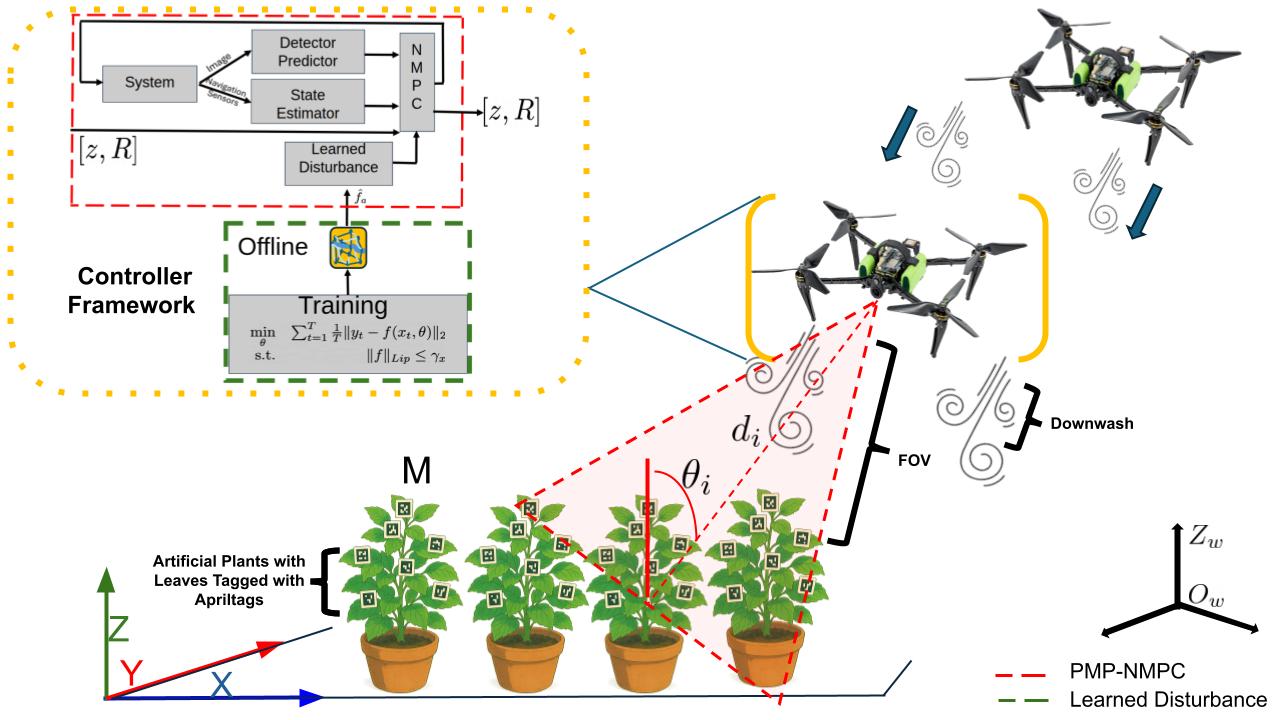
Our paper, “Neural PMP-NMPC for Adaptive and Stable Quadrotor Control in Perception-Driven Tasks,” has been accepted to the 2026 International Conference on Unmanned Aircraft Systems (ICUAS 2026).
We look forward to presenting the paper in Corfu, Greece.