Research
Our research focuses on developing control algorithms for multi-robot topology control by utilising state-of-the-art machine learning models.
Highlighted
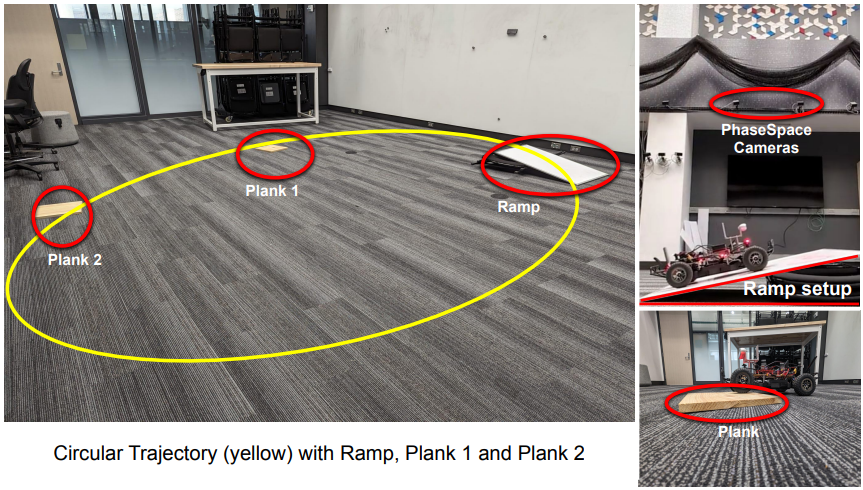
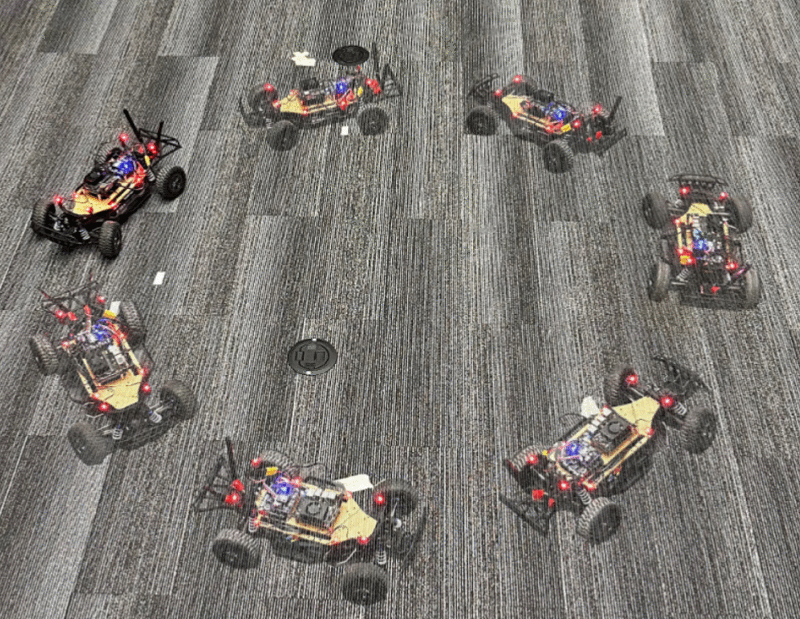
Neural L1 Adaptive Control of Vehicle Lateral Dynamics
IEEE ICRA
·
27 Jan 2025
·
arXiv:2405.16358
System Identification and Control of Front-Steered Ackermann Vehicles Through Differentiable Physics
IEEE IROS
·
13 Dec 2023
·
10.1109/IROS55552.2023.10342391
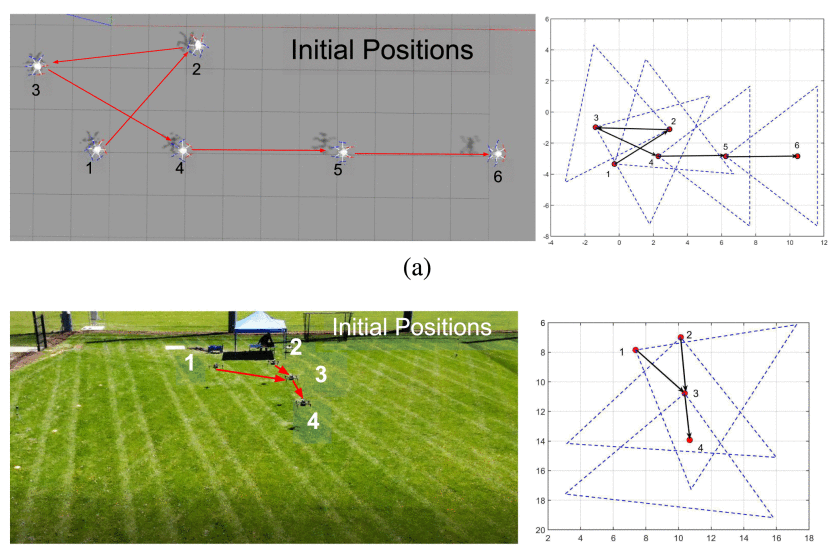
Multirobot Field of View Control With Adaptive Decentralization
IEEE TR-O
·
01 Feb 2022
·
10.1109/TRO.2022.3142660
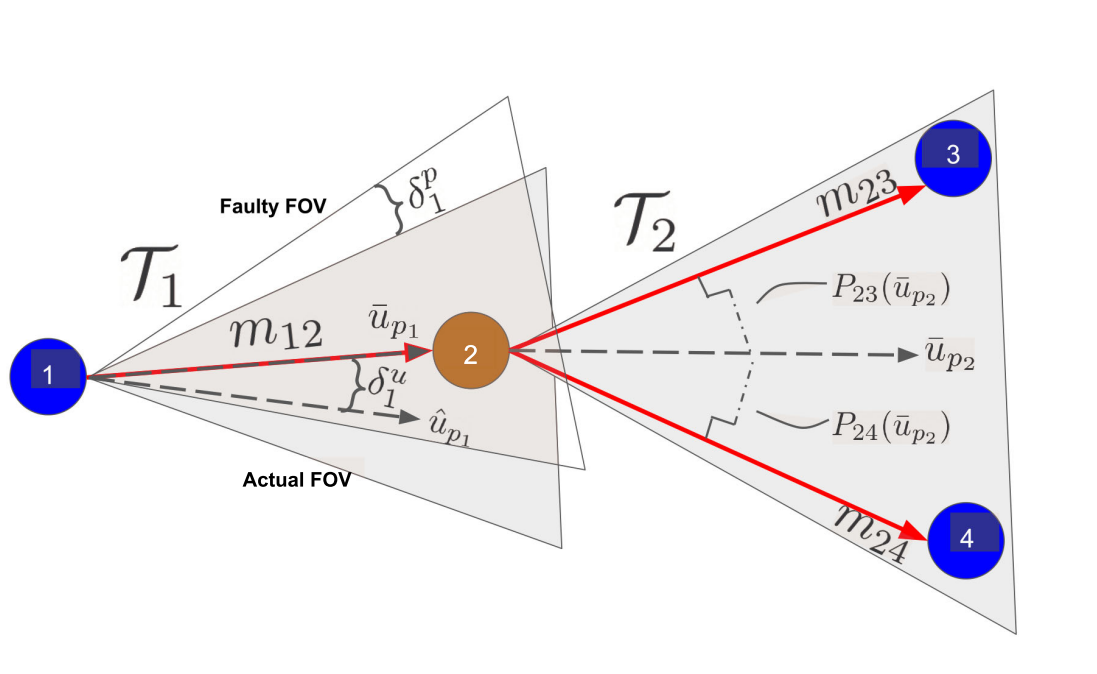
Distributed Adaptive and Resilient Control of Multi-Robot Systems With Limited Field of View Interactions
IEEE RA-L
·
03 Mar 2021
·
10.1109/LRA.2022.3155822
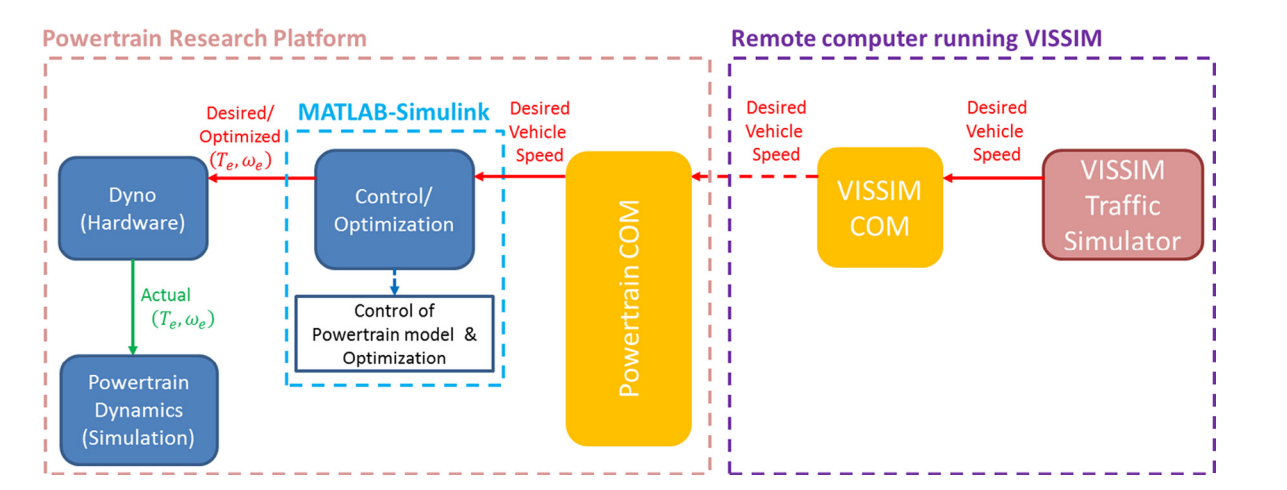
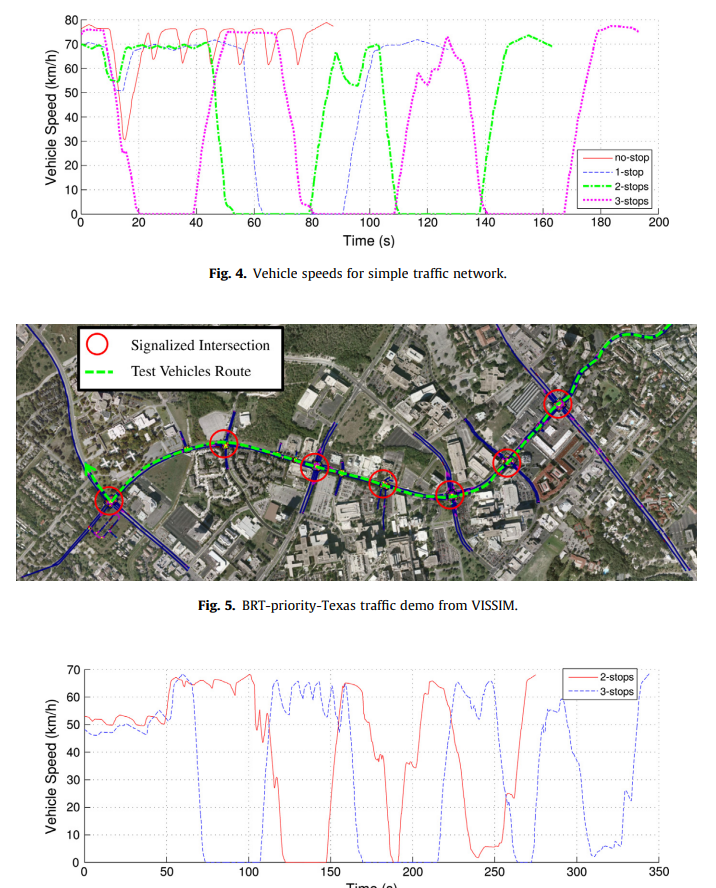
Hardware-in-the-loop testbed for evaluating connected vehicle applications
Transportation Research Part C Emerging Technologies
·
01 May 2017
·
https://doi.org/10.1016/j.trc.2017.02.01
Evaluating Connected Vehicles and Their Applications
ASME
·
01 Dec 2016
·
https://doi.org/10.1115/1.2016-Dec-3