Projects
For the PI’s previous projects, prior to 2024, please visit the website.
Featured
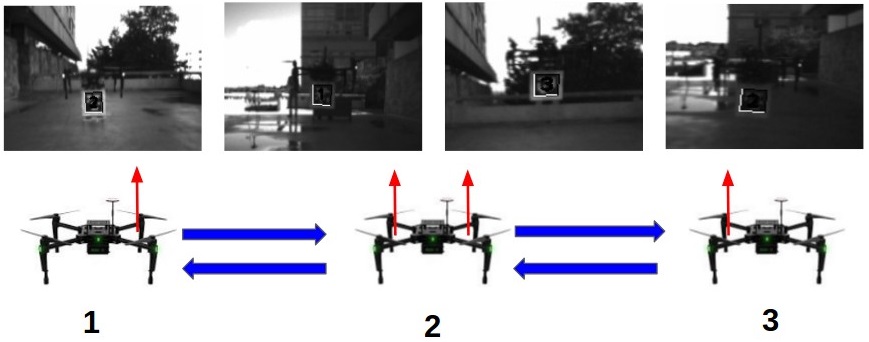
Test optimal control algorithms on a team of unmanned aerial vehicles (UAVs), in real-world conditions using the experimental MRS test-bed.
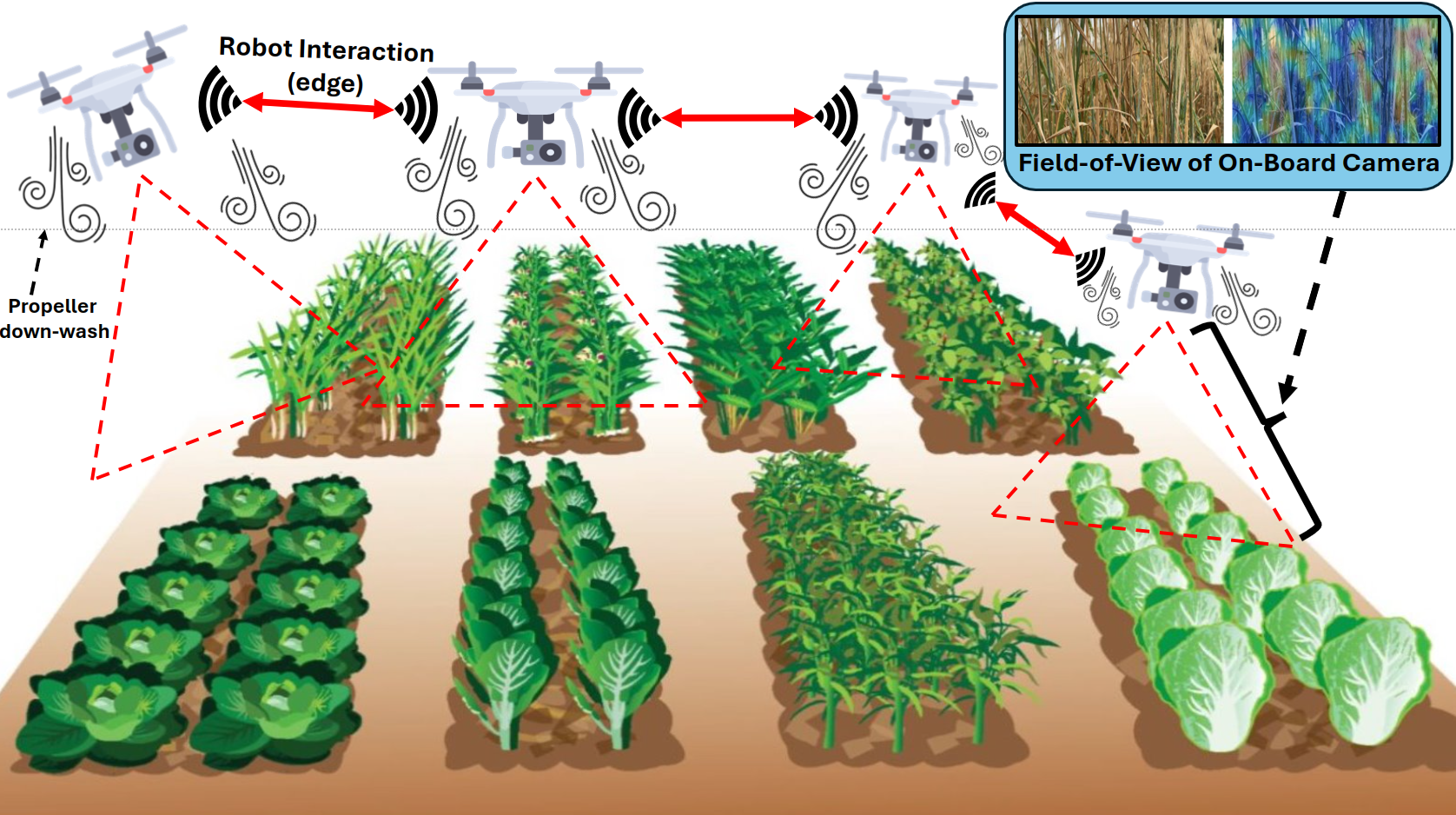
Integrating camera based active information acquisition for agriculture with stably coordinating unmanned aerial vehicles in multi-robot teams.
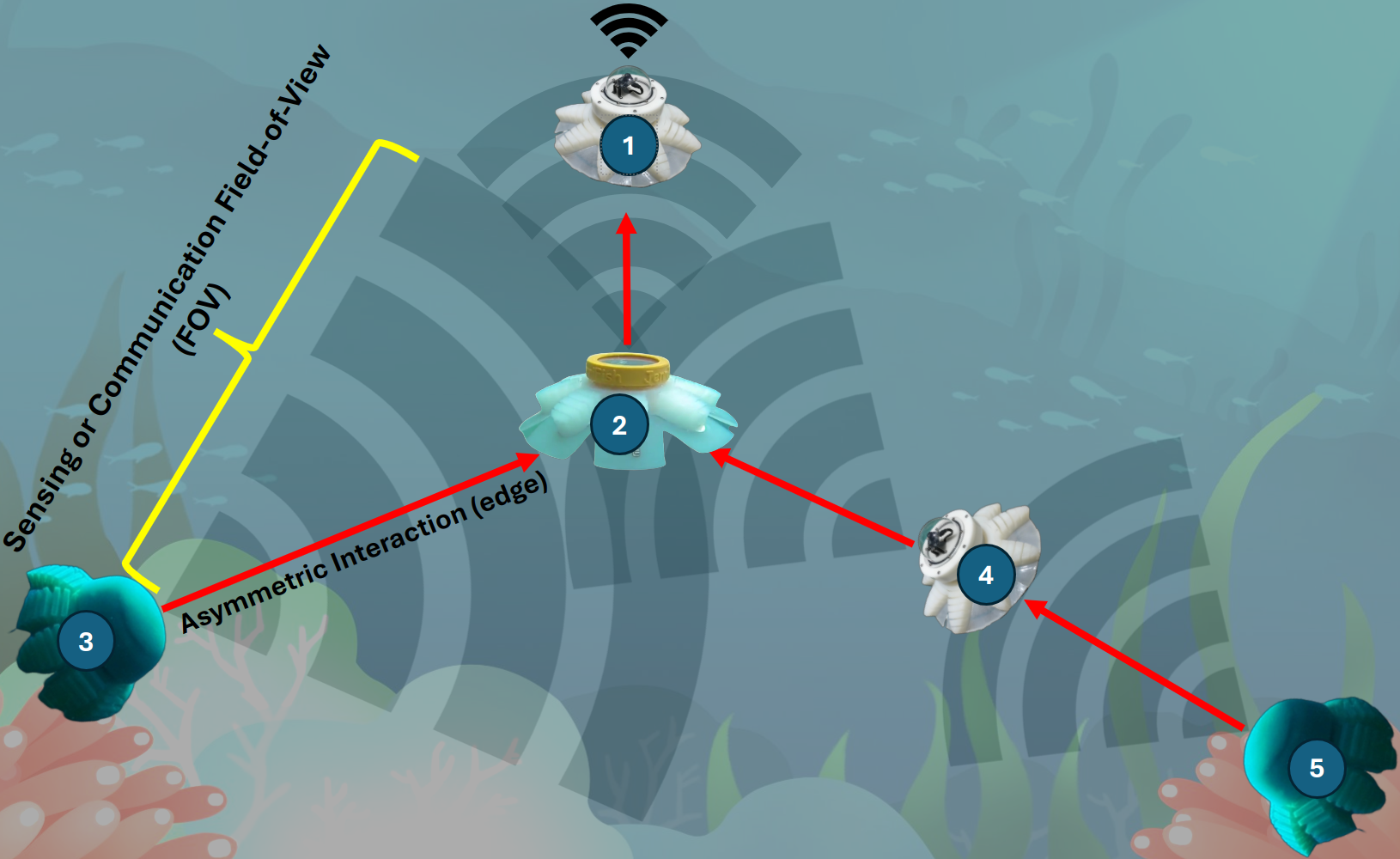
Developing distributed and scalable multi-robot topology control algorithms for a team of underwater soft robots.
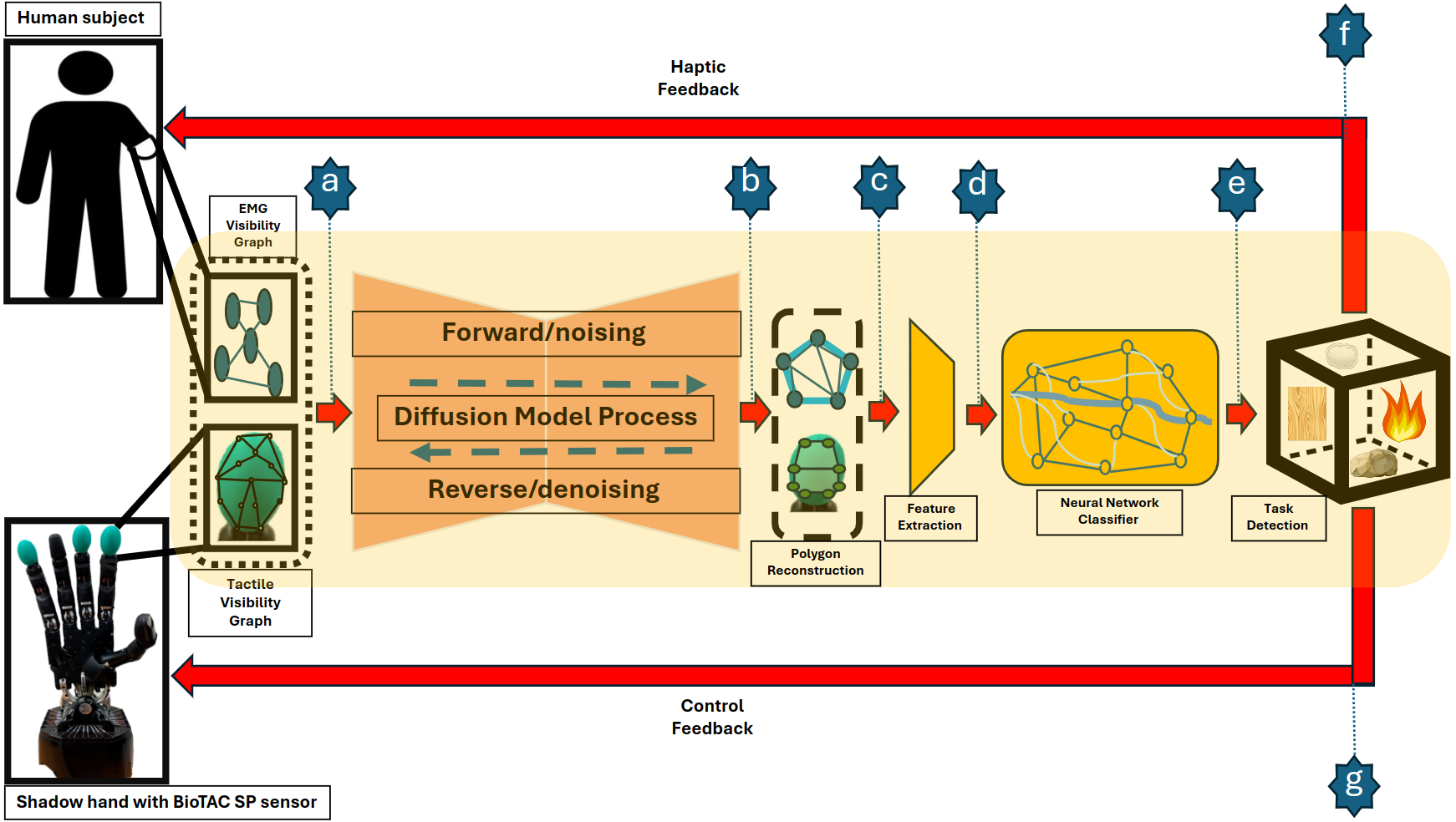
Enhancing the capability of manipulator class of robots equipped with tactile sensors by using generative model approaches to classify manipulation tasks such as- object recognition, material classification, texture recognition, slip detection and grasp stability.