Neural L1 Adaptive Control of Vehicle Lateral Dynamics
In this work, we address the problem of stable and robust control of vehicles with lateral error dynamics for the application of lane keeping. 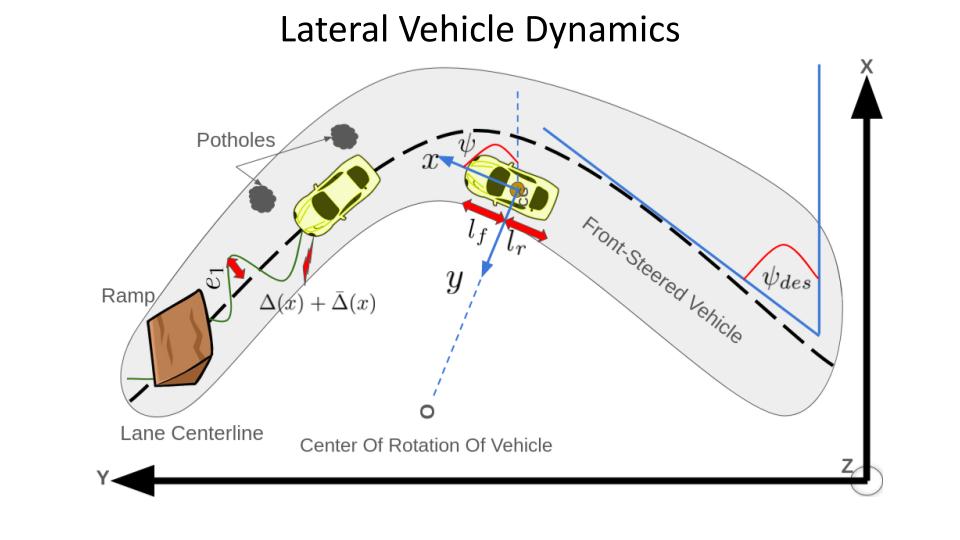
In this work, we address the problem of stable and robust control of vehicles with lateral error dynamics for the application of lane keeping.
In this work, we address the problem of stable and robust topology control of multi-robot system with asymmetric interactions. 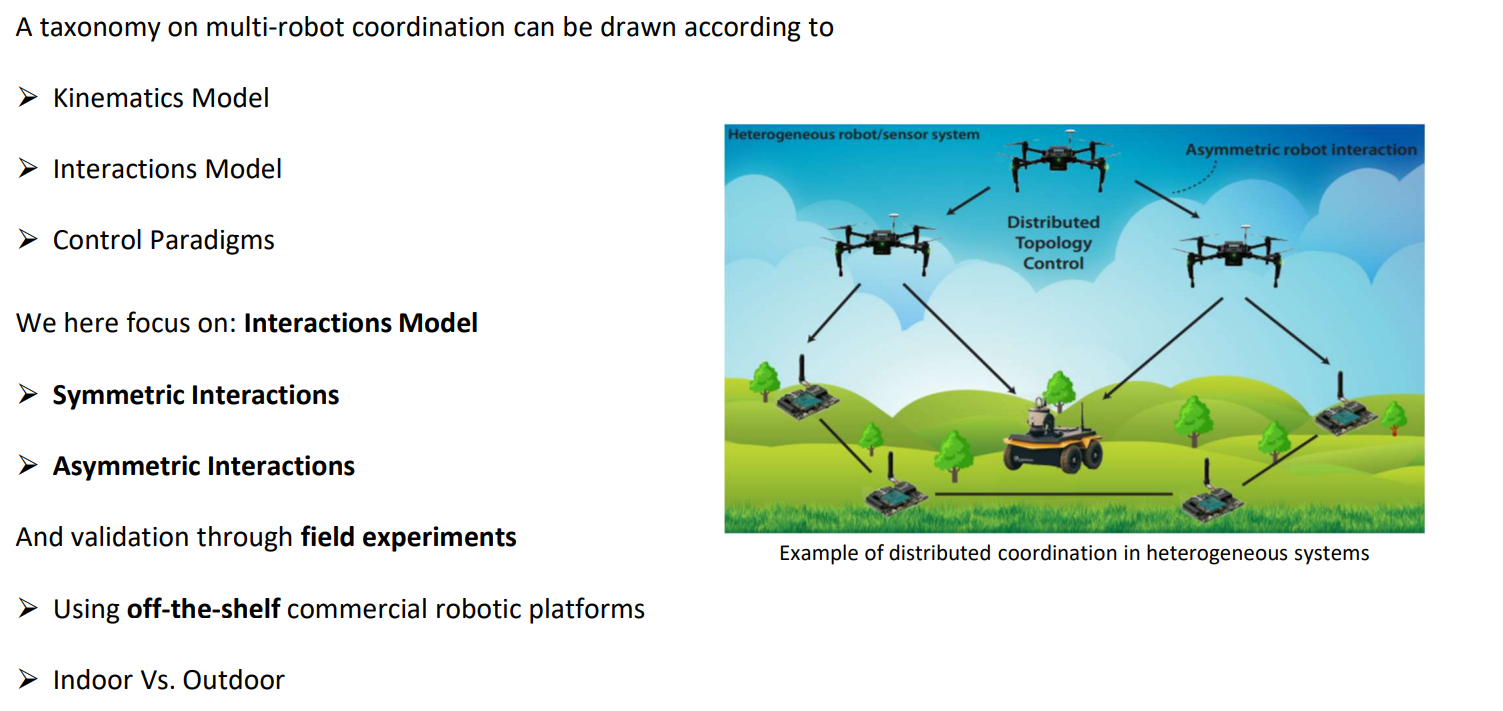
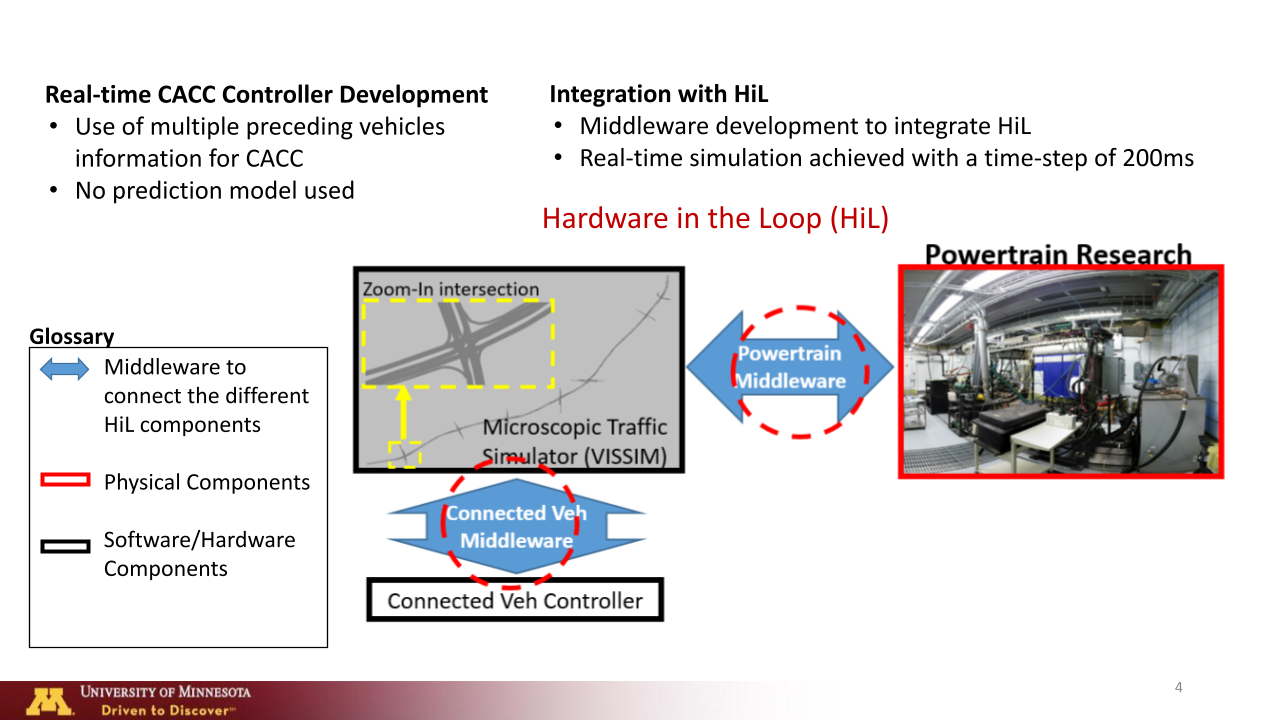
Evaluation of Cooperative Adaptive Cruise Control using HiLS Set-up