Neural L1 Adaptive Control of Vehicle Lateral Dynamics
In this work, we address the problem of stable and robust control of vehicles with lateral error dynamics for the application of lane keeping. 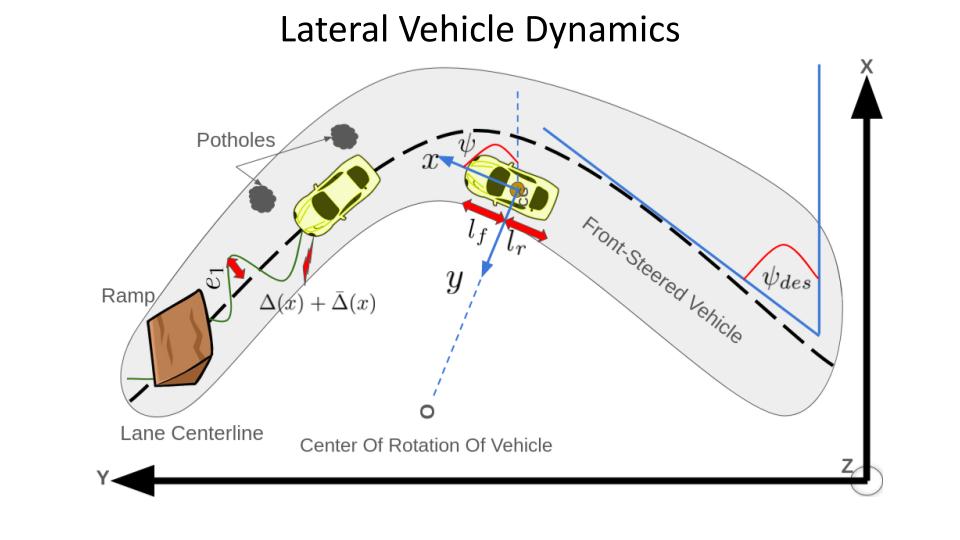
In this work, we address the problem of stable and robust control of vehicles with lateral error dynamics for the application of lane keeping.
In this work, we address the problem of stable and robust topology control of multi-robot system with asymmetric interactions. 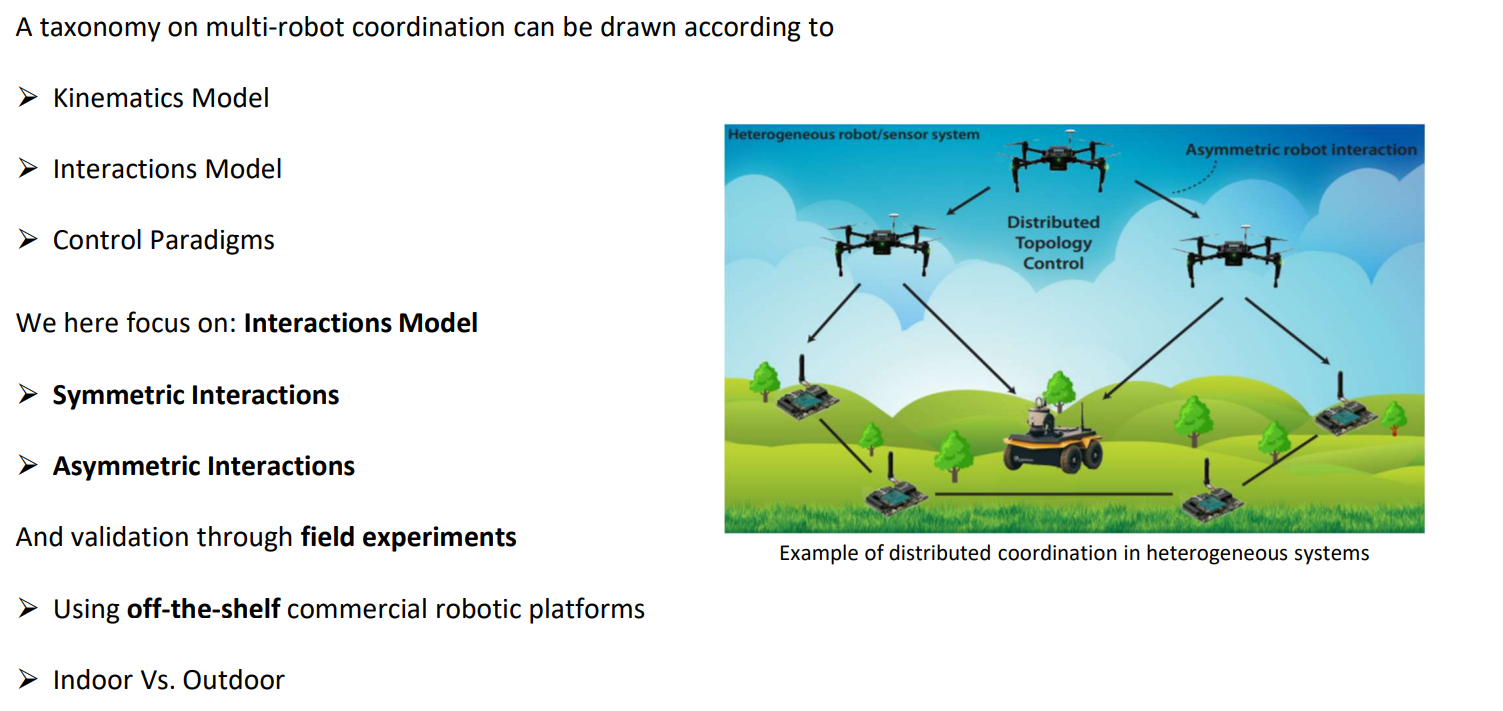
Evaluation of Cooperative Adaptive Cruise Control using HiLS Set-up 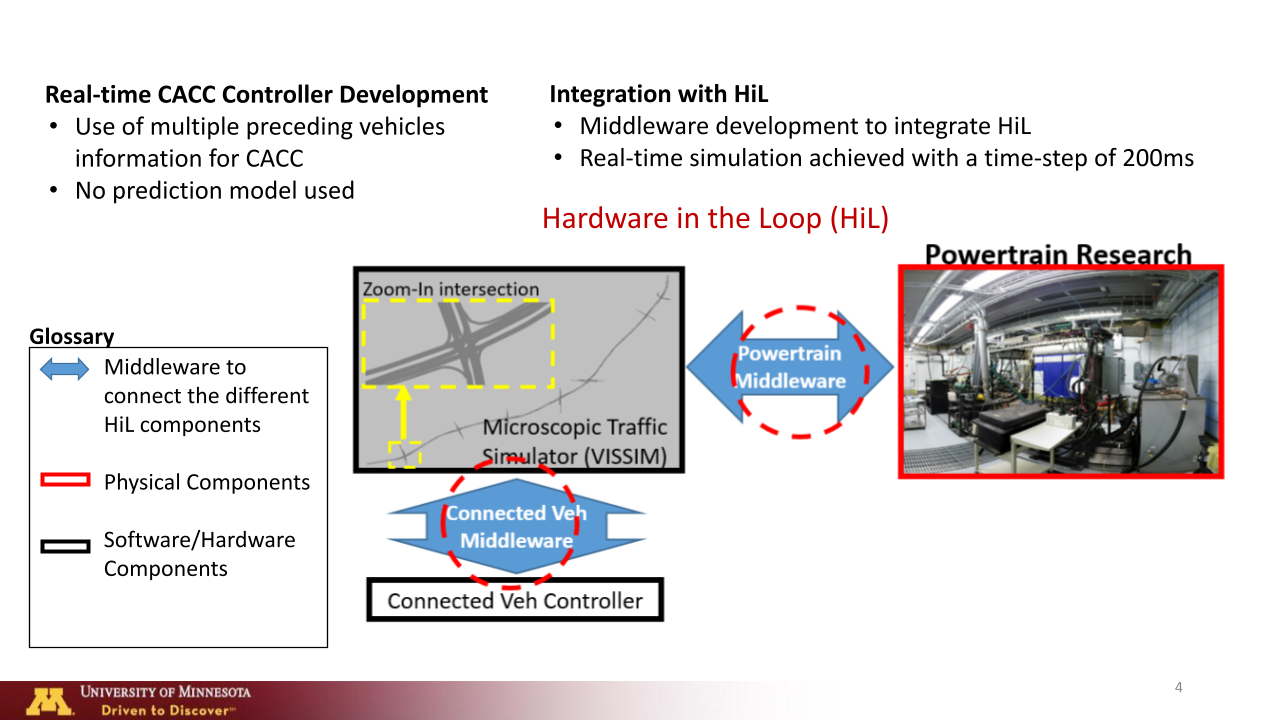
Published in Transportation Research Part C: Emerging Technologies, 2017
Evaluation of CACC application using HiLS.
Recommended citation: Zulkefli, Mohd Azrin Mohd, et al. "Hardware-in-the-loop testbed for evaluating connected vehicle applications." Transportation Research Part C: Emerging Technologies 78 (2017): 50-62.
Download Paper
Published in IEEE International Conference on Robotics and Automation (ICRA), 2020
Topology selection for multi-robot optimal control.
Recommended citation: Mukherjee, Pratik, et al. "Optimal topology selection for stable coordination of asymmetrically interacting multi-robot systems." 2020 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2020.
Download Paper
Published in IEEE Robotics and Automation Letters, 2022
Adaptive control application for multi-robot limited field-of-view control.
Recommended citation: Mukherjee, Pratik, et al. "Distributed adaptive and resilient control of multi-robot systems with limited field of view interactions." IEEE Robotics and Automation Letters 7.2 (2022): 5318-5325.
Download Paper
Published in IEEE Transactions on Robotics, 2022
Experimental Validation of topology control of multi-robot system.
Recommended citation: Santilli, Matteo, et al. "Multirobot field of view control with adaptive decentralization." IEEE Transactions on Robotics 38.4 (2022): 2131-2150.
Download Paper
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University of Minnesota Twin-Cities, Mechanical Engineering, 2014
Calibration, Uncertainty Analysis.
Undergraduate course, University of Minnesota Twin-Cities, Mechanical Engineering, 2015
Frequency response testing,Closed loop velocity and position control.
Undergraduate course, Virginia Tech, Electrical and Computer Engineering, 2016
Z-domain analysis, transfer functions, stability and frequency re- sponse.
Undergraduate course, Florida Atlantic University, Ocean and Mechanical Engineering, 2025
Laplace Transforms, Block Diagram Reduction, Transient Responses, PID control.